

WDBE UPDATES // Meet our keynote speaker!
On-Site Supersensing and the Future of Automation: Discussing Construction, Robotics, and Contemporary Data Capture with Aviad Almagor
In the run-up to WDBE 2021 event, we sat down with Aviad Almagor, the Division Vice President of Emerging Technologies at Trimble Inc. Our conversation covered the renewed need for technological integration, the power of autonomous robotics, and what the pandemic demonstrated about the future of the current built environment.
Hi Aviad, can you tell us a little bit about your career to date and what you and your team are currently working on?
I’m an architect by profession and practiced for several years before switching to the software industry. I joined Trimble about 10 years ago as part of an acquisition. Since then, my focus is on innovation and emerging technologies. My team is currently working on disruptive technologies that can help transform the industry. We serve things like mixed reality, brain computer interface, quantum computing and – of course – robotics.
What kind of digital, logistical and practical challenges does this produce?
AI in construction is an exciting topic though the industry is traditionally not very well-equipped to adopt technology in a very effective way. AI is an enabling technology which can be used to support and augment work. This means we can automate processes; predict delays in schedule; cost changes; even design issues and prescribe and provide decision makers with the right information to be efficient and to make the right choices for projects.

Get your ticket to the WDBE Summit 28–29 Sept 2021 (199€ + VAT)
Is this capacity to make the right decision at the right time a key consideration? Is it a concern for contemporary construction?
Time is a critical factor. It impacts everything from cost, to quality, to sustainability. When we consider the needs of a construction site, this means understanding the complexity of the operation and dependencies. If things go wrong, this produces a cascading effect which creates delays, cost and quality issues and damages customer satisfaction.
This year’s theme is Urban Supersensing. How does sensor technology affect your current work?
For me, urban super sensing is directly linked to the concept of a Digital Twin – a digital replica of the physical environment. While the technology is already here, what is missing is the integration of the technologies that enable us to really bring together the physical and the digital environments. Once these domains are integrated you can actually feed the site and automate processes. So, imagine robots getting information directly from a design database and vice-versa. Sensor information from the site can feed the system and address concerns about quality issues, discrepancies, delays and – later on – maintenance work and operations. Ultimately, all this will dramatically improve the efficiency and the quality and the safety of the site.
Are there other issues you find yourself facing on-site?
Absolutely. From my experience, the technology is not the issue in most cases, it’s about adapting the technology to the real needs of the users and specific workflows. The real challenge is about making sure that what we are developing an ability to address the real-world needs on site. Of course, let’s be clear – you’re going to find resistance to technology everywhere. But if you will prove that a technology can really change and make an impact on the safety, sustainability, or efficiency of work – you will find the users, onsite workers, owners, and general contractors open to change.
Is there anything practitioners can be doing to facilitate this atmosphere of change?
First of all, it’s our responsibility to provide the confidence that the technology can indeed serve the end user. We’re doing this by investing in educating the market about the technology and its capabilities. This means creating close relationships with customers and working to really understand their needs, their pains, and then to gradually expose them to the technology. This helps us figure out what is working well, what is not, where are the technology gaps, and what we need to improve in order to make the tool really efficient. Then it becomes a journey that we are on together with the customers from an early, visionary concept to implementation, and the successful end-use of the technology.
I presume our current era also provides its own challenges?
Of course – we’re in an early phase of robotics and part of the challenges are to set the right expectations and to identify use cases where the technology can be already useful. For example, let’s take contemporary robotics. We can identify where robots can perform dull, repetitive and dangerous tasks, and direct our efforts in order to fulfil requirements and support tasks. This could be as straightforward as monitoring a site instead of sending a human out to do repetitive work, which may carry some risk. This can of course be manually operated, but the introduction of automation is an example of the low-hanging fruit we can already support with technology and then implement together. So, today, I can take a robot. I can teach that robot a task. That robot will follow their set path quite effectively using the special understandings and mechanisms we already have to identify features along their set path. But, as we all know, construction sites are very dynamic and change over time – often on a daily basis. Imagine we need to send this robot to a different environment with little warning. Here AI and semantic models and machine learning processes help us better understand the environment, which then helps the robot better understand their environment, and resist daily disruptions that would derail performance.
What technology helps the unit obtain this data, and how is the data validated?
Data capture is vital. The longer the range of the reality-capture sensors on the robot, the better. Because it will enable the robot to better understand the environment. This is especially important in areas where you have repetitive objects. For example, a large floor with repetitive columns. If you are a robot, how do you know where you’re standing? Longer sensor range helps provide this fuller picture and integration with design data also helps improve our understanding. This could include adding a 3D model into robot navigation maps which then enables them to identify alternative routes in case of unforeseen challenges. This could be as simple as a pile of material blocking what was meant to be a clear route or dealing with significant risks like rebar cages. But of course we need to go back to the users, because we don’t care about the robot itself.
What we care about is the output that a unit can deliver and how that ultimately works to support decision makers. This element is highly task dependent and for that we use different sensors. We can use RGV cameras to monitor and communicate easily with all stakeholders in the project based on daily pictures that the robot will take. We can use highly accurate reality capture devices like laser scanners with millimeter accuracy and a range of 100 meters. These tools can be used engineers or contractors to better understand the accuracy of the installation and monitor the progress of the work.
Did anything about the pandemic challenge your ideas and preconceptions about the industry?
Actually we were surprised by the demand for robotics capabilities during the pandemic. The reason for this was that, with robots physically on site, you can safely carry out site visits. You can conduct remote monitoring and provide stakeholders with an ability to remotely immerse themselves on the site, and communicate with the teams while remaining in a safe environment. So, in this respect, the pandemic actually was an interesting kind of motivator to push robotics and automated processes.
Do you feel this is a pattern for the sector? Or do believe there are other trends that we should expect robots and AI to tackle?
I wish I knew the full answer [laughs]. But what we absolutely do need to do is look at this in the light of other trends. These don’t have to be technological trends, but certainly business trends. We’re recently seeing a shift from on-site construction to prefabrication. I believe we’re going to start to see construction sites turning into assembly sites, which will in turn will help robotics to be more efficient. This means more automated processes, autonomous machines working on side and on the side, much better predictive and prescriptive processes to support a more efficient environment.
Finally, can you give us a taste of what you’re going to cover for WDBE 2021?
Definitely – it will be an opportunity to learn more about the unique partnership between Trimble and Boston Dynamics and how we bring to the domain knowledge from both sides in order to really help transform the construction industry. I will not say more other than this is going to be an exciting keynote. So, I encourage you all to join us.
More Updates
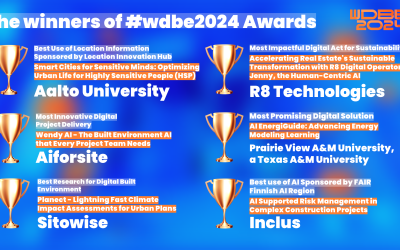
WDBE 2024 Awards Winners: Highlighting the Advancement of Built Environment
The World of Digital Built Environment (WDBE) Summit announced the winners of the WDBE 2024 Awards which highlight notable digital advancement in the built environment. This year, submissions were received across six categories, showcasing practical and innovative solutions in areas such as sustainability, research, project delivery, and AI.

WDBE-talks: The Well-Being Revolution in Real Estate: Trends, Tech, and Transformation
In the podcast episode, William delved into the burgeoning field of health and well-being in the built environment, a relatively new focus within real estate. He shared his journey from project management and asset management to his current role, driven by a keen interest in how our living and working environments impact our health.

WDBE-talks: Industrializing construction: Myths, Realities, and Future Prospects with Amy Marks and Kevin Cardona
In the podcast episode, Amy and Kevin discuss the challenges the construction industry faces and the necessity of shifting business models to achieve more sustainable and efficient construction practices.

WDBE-talks: Innovating AEC Business Models for the Virtual Future with Amy Peck and Mark Bryan
In this episode of WDBE Talks, Aarni Heiskanen had the pleasure of hosting two distinguished guests from the USA: Amy Peck, Founder and CEO of EndeavorXR, and Mark Bryan, Senior Foresight Manager at Future Today Institute. Amy and Mark will deliver keynotes at the upcoming WDBE 2024 conference, focusing on reshaping built environment business models for the future.

Digital Transformation of the Built Environment Sets New Requirements: Future Today Institute Expert Sheds Light on Future Prospects at WDBE2024 Summit
Mark Bryan, Senior Foresight Manager at the Future Today Institute, which focuses on strategic foresight, has been confirmed as a speaker for the World of Digital Built Environment (WDBE) 2024 Summit.

WDBE-talks: New Business Models Unveiled with Olivier Lepinoy and Jaan Saar
In this WDBE Talks episode hosted by Aarni Heiskanen, two WDBE 2024 keynote speakers,
Olivier Lepinoy and Jaan Saar, discuss the significance of reimagining traditional business
models within the construction sector.
Olivier is the visionary founder of HYPER Construction, and Jaan is the Chief Evangelist at Future
Insight. Both thought leaders have experience innovating business models and share their
insights in this podcast.
The WDBE is co-created by


In partnerships with




